Formula 1: l’anti-dive. Cos’è e come funziona

PH: gettyimages
In Formula 1, e nel motorsport in generale, da un po’ di decenni si utilizza l’anti-dive. Mai sentito nominare? Nessun problema, ora analizziamo la necessità di utilizzarlo e andiamo a vedere benefici e svantaggi.
Come abbiamo già detto, quando abbiamo parlato dell’impianto frenante di una monoposto, in fase di frenata si verifica il trasferimento di carico tra gli assi che porta ad un aumento del peso su quello anteriore. Generalmente, si verifica che le molle anteriori si comprimono e la vettura tende ad abbassarsi sul davanti. Il trasferimento di carico dipende principalmente da tre variabili:
- la “potenza” della decelerazione;
- l’altezza del baricentro;
- la posizione del baricentro e, ovviamente, il passo della vettura.
Dunque, se conosciamo questi tre dati, possiamo facilmente ricavare l’entità del trasferimento e dunque, in base anche alla rigidità delle molle, è possibile sapere di quanto si abbassa in avanti la vettura.
Un esempio più concreto è quello di una vettura stradale, poiché nelle vetture da Formula 1 l’abbassamento è molto ridotto poiché il baricentro è molto basso, e le sospensioni sono molto rigide. Tuttavia, essendo la Formula 1 moderna dominata dall’aerodinamica, avere dei trasferimenti di carico che portano ad un minimo abbassamento dell’auto, in piena frenata da velocità superiori ai 340 km/h, potrebbe causare qualche problema.
Nel 1992, la Williams introdusse le sospensioni attive, che avevano il compito di ovviare il problema mantenendo l’assetto costante durante tutto il giro.
Anti-dive: il problema dell’assorbimento sconnessioni
È possibile agire sull’abbassamento sia elettronicamente, che meccanicamente. Quest’ultimo consiste nel creare il braccio longitudinale equivalente, sfruttando la geometria delle sospensioni. In pratica, le forze del trasferimento di carico di scaricano sul telaio proprio grazie ai braccetti e l’assetto della vettura resta invariato.
Questa soluzione, però, è stata accantonata poco dopo perché un eccessivo anti-dive non consente alla sospensione di assorbire le asperità, e ciò porta alla formazione del brake hop, ovvero un fenomeno che fa “saltellare” l’auto in maniera completamente incontrollata.

L’anti-dive ha visto lo sviluppo anche nell’ambiente delle due ruote. Nello specifico, negli anni Ottanta, ci fu un’ampia dedizione all’anti-dive, al punto che Kawasaki, Suzuki e Honda hanno sviluppato dei sistemi che sfruttavano l’olio del circuito frenante per azionare una valvola posizionata sulla forcella che consentiva di rendere più rigida la sospensione. Visto che le sospensioni rigide subiscono l’abbassamento in quantità minori, ecco che il problema è parzialmente risolto. Anche questo sistema, funzionando come il braccio longitudinale equivalente, è stato abbandonato perché le sconnessioni in frenata non venivano assorbite.

Tornando alla Formula 1, il problema da risolvere era doppio: avere preferibilmente l’assenza di abbassamento, e nel frattempo avere il giusto assorbimento delle sospensioni. Il tutto, andava fatto senza l’ausilio dell’elettronica, in quanto è vietato ancora tutt’oggi dal regolamento tecnico.
Iniziamo dallo schema che ne illustra il posizionamento:

Si nota la presenza di un attuatore idraulico che è stato inserito nel puntone della sospensione push-rod. Il collegamento non è stato reso ufficiale, tuttavia due sono le ipotesi: o l’attuatore è collegato direttamente all’impianto idraulico, o addirittura al pedale, tramite una pompa apposita.
Quando si verifica l’abbassamento, l’attuatore di estende per opporsi al movimento. Passiamo, però, al punto di vista ingegneristico. Quali sono le forze che agiscono, quali schemi vanno seguiti e così via.
Approccio ingegneristico all’ anti-dive
Ogni volta che si accelera, il veicolo ha la tendenza a inclinarsi e la parte posteriore viene spinta verso il basso. Ciò succede a causa dell’inerzia, in un modo simile che ci spinge nei sedili quando acceleriamo. Bisogna immaginare un’oscillazione con estensione verticale al centro. Se si applica la forza al punto C, l’intera “figura” ruoterà e il punto B si abbasserà.
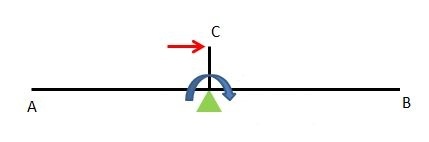

Per fermare la rotazione, dunque, basta (è facile a dirsi), esercitare una forza che si oppone all’abbassamento.
Questo punto C è il CG (centro di gravità) del veicolo e A e B sono i punti in cui l’auto è collegata agli pneumatici attraverso la sospensione. La freccia rossa è la forza inerziale che agisce sul CG e la freccia blu è il supporto virtuale fornito dai bracci trasversali della geometria della sospensione.
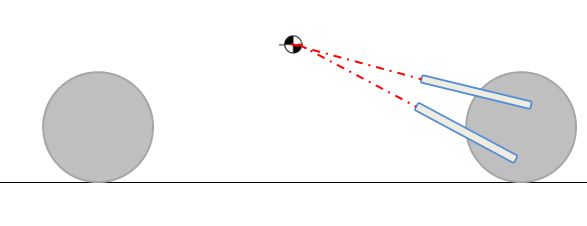
I bracci trasversali sono i collegamenti che collegano le ruote al corpo vettura. Il veicolo tende a ruotare/inclinare sul punto in cui questi bracci trasversali si incontrano virtualmente. Questo punto può essere chiamato centro di rotazione.
Quindi quando acceleri, viene esercitato un momento in CG con valore M = F * r
F = forza inerziale in CG;
r = distanza tra CG e centro di rotazione.
Quindi se fai questa distanza zero, il tuo momento sarà zero e la macchina non salterà. Questa è chiamata geometria anti-squat al 100%. Il centro di rotazione può essere regolato per cambiare la percentuale di anti-squat. Quando lo stesso concetto è applicato allo pneumatico anteriore, parliamo di geometria anti-dive.